

伺服液压运动控制:选择PLC还是运动控制器?
一些闭环运动控制的应用很显然需要运动控制器,然而一些人也可以通过使用PLC来实现闭环控制。当然,选择何种控制方式常常难以定论。
当你可以使用PLC控制的时候,为什么还需要花钱去购买一个专用的电液运动控制器呢?答案很简单。一般来说,考虑的因素包括使用数量,实现难度,可用时间,生产效率,精度要求以及经济性等。做出何种决定往往是很模糊的。根据以往的经验,我知道哪种类型的应用可以用PLC,哪种不适用。
对于大多数的控制系统设计者来说,成本是首当其冲的想法。最简单的办法就是购买带有模拟量输入和输出的PLC用于各种轴的控制,还可以带有一些数字I/O,接着就可以编程了。通常都是从最简单的比例控制开始,甚至PID控制块都不需要。这就是目前市面上大多数的液压伺服控制的做法,人们接受液压的培训很多,但也仅限于此。
模拟量的反馈必须转化缩放为位置单位。然而,我很奇怪的是,在一些PLC论坛里,很多的人在咨询如何把一个模拟量转化为毫米或英寸。如果编程的工程师在问,很显然他啥也编不了。对输入值比例缩放之后,很简单的做法就是,从指令位置减去实际位置,差值乘以比例增益,该值作为模拟量的输出至阀。就是这么简单!
伺服液压运动控制:选择PLC还是运动控制器?
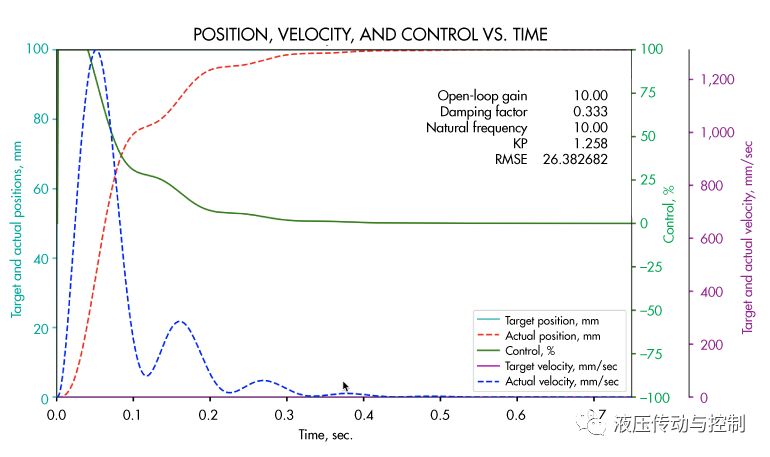
1. 该仿真显示了当指令位置突然改变100mm时将会发生什么。控制输出在100%饱和,执行器突然加速。实际位置则慢慢的接近100mm的目标值。
模拟量控制的PLC设置
PLC控制的一个挑战发生在液压缸的指令和实际位置相差很大的情况,因为此时输出至阀的信号可能很大。结果就是液压缸全速运动至指令位置。在指令位置的时候会发生什么就取决于增益和负载大小了。有时候液压缸会平滑减速至指令位置,但是如果负载很大,也会产生超调,并带有衰减振荡。
关于此问题可以有多种解决方案。一个简单的办法就是限制输出值为低于100%的某个值。更好的解决办法就是准备一个目标发生器,从而可以朝着指令位置的的方向增加目标值。接着,不是比较指令位置与实际位置,而是比较实际位置与下一个目标位置。目标位置在当前位置开始启动,按照期望的速率增加并达到指令位置。对于长行程运动来说,则可以避免初始运动时的振动和冲击。这种解决方案相对来说也比较容易实施。
举个例子,如果两个液压缸跟随同样的目标位置,其位置同步是相对容易的。如果两个缸所受的负载完全一致,目标值的跟踪误差也应该一致,因此它们的实际位置也会非常接近。那么,对于只有比例控制的系统来说,跟踪误差是什么呢?
跟踪误差公式:
Ef = v/(K ? Kp)
此处:
Ef - 跟踪误差,mm,
v - 速度, mm/s,
K - 开环增益, (mm/s)/%
Kp - 比例增益, %/mm.
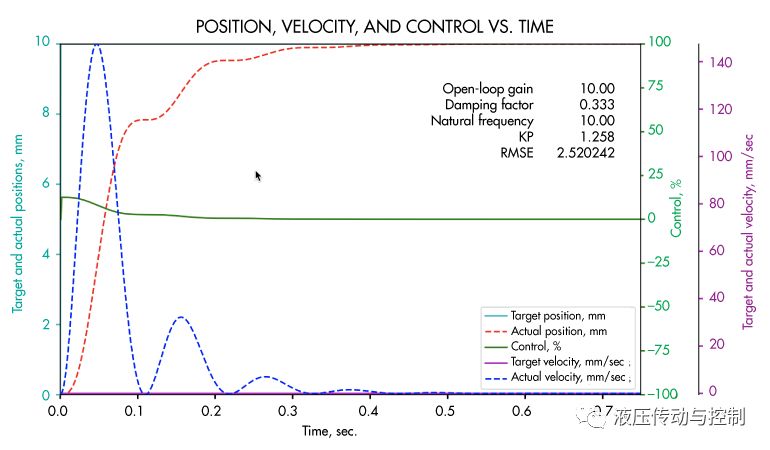
2. 该曲线与图1说设想的方案一样,只是指令位置只改变10mm。注意的是它们用了同样的时间。这是因为运动控制的时间常数是5倍。5倍时间常数即0.358s。意味着1mm的运动要花0.358s才能达到目标值的1%。
单位很重要,并需要保持一致。百分比代表控制输出的百分数。控制输出的百分数可以是 ±10 V, ±20 mA的百分数,或者其它的,只要单位一致就可以。当使用PLC的时候,跟踪误差通常情况并没有那么重要,液压缸只需要能够大体的接近指令位置即可。上面的等式适用于对跟踪误差有限定的应用。用户可以决定动作速度,以满足应用要求。
计算开环增益需要用到VCCM公式,其计算了在100%控制输出时最大的稳态速度。该公式在相关论坛已经讨论过很多次。(延伸阅读:VCCM-如果流量计算不再是Q=A*V?)
比例增益的计算稍微复杂一些。你可以尝试使用试错法,确定一个可以看起来可以工作的数值。如果增益太低,液压缸响应会很迟缓。如果增益太高,执行器会有振荡的可能。然而,最优的增益是可以计算的:
Kp = 2 ? ζ? ωn ? (9 ? 8 ? ζ2)/(27 ? K)
此处:
Kp - 比例增益,输入偏差信号变化的相对值mm与输出信号变化的相对值之比的百分数表示,
ζ - 阻尼系数(未知时假定为0.3333),
ω - 自然频率,弧度/s
K - 开环增益

电话:15906845558 QQ:41780253
网址:www.gkplc001.com
江东教学点:宁波江东百丈东路1130号海运港8楼(地铁一号线旁边)
海曙校区:海曙区学院路788号upark商业公园B4幢一楼
石浦大酒店旁边匠心教育
Copyright @ 2010-2020 宁波蓝天教育. All Right Reserve
备案号:浙ICP备16003439号-2




 在线咨询
在线咨询
 15906845558
15906845558