

1 引言
近年来伴随着工业自动化领域的技术革新,三轴机械手广泛地应用在高温、高压等恶劣环境中。三轴机械手的广泛应用,对其运行控制的要求不断提高,准确的定位,牢固的抓取、移动已成为机械手运行性能的基本要求。基于PLC的三轴机械手控制系统,以PLC为核心控制器,应用机械臂运动学、步进驱动、触摸屏技术等多项技术,通过对机械手的柔性化设计,实现了机械手的不同操作。
2 系统原理
三轴机械手控制系统是一种以多轴联动为核心控制任务的实时监控综合系统[1]。主要由上位机和下位机组成,上位机系统由WinCC和MCGS触摸屏组成,采用TC/PIP协议进行通信。下位机系统由西门子S7-1200PLC、步进驱动器、步进电机、真空泵、启停按钮、限位开关等组成。
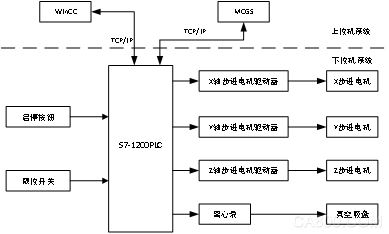
图1 总体设计图
参见图1所示,其工作过程为:通过WinCC或MCGS实时设定的空间位置坐标等参数,并结合机械臂控制算法来确定S7-1200控制器的输出信号,再由PLC高速输出口发出脉冲频率和脉冲个数到步进驱动器,以驱动减速步进电机按指定位移和速度带动各个连杆运动。
3 机械臂逆解分析
本设计使用的机器手由三个42步进电机和连杆构成。对于三轴控制机械手,最基本的是要建立运动学模型。对于三轴机械手,运动模型本质上是三维的给定的空间和三个轴的旋转角的坐标,求解三个轴的旋转角度。
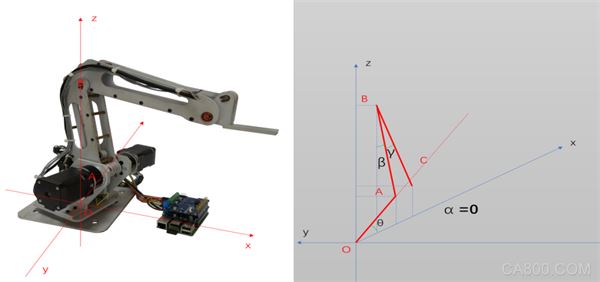
图2 机械臂抽象分解示意图
参见图2所示,左侧为实物坐标,右侧图为抽象到坐标系的几何表示。逆解过程就是知道末端坐标,而求解各个轴的旋转角度,进而转换为步进电机的步进数,利用立体几何,和解析几何知识来进行逆运算分析如下。
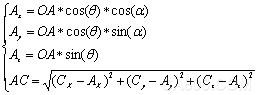 (1)
(1)
根据上述方程式,即可解出α、β、γ的值,基于此三个角度值除以步进电机的步进角度,轻松计算出从上一个位置到现在位置需要步进多少步,本项目采用的是减速电机,所以还要将求解的步数乘以减速比为最终的行进步数。
4 控制系统的程序设计
本系统的软件设计部分主要使用博图V14软件设计相关控制程序。为了便于调用和修改程序,在主程序中编写了系统初始化、连续运动、码垛和轨迹规划四个子程序。如图3所示。其中,逆解控制算法和轨迹规划控制算法是整个控制要求得以实现的核心。
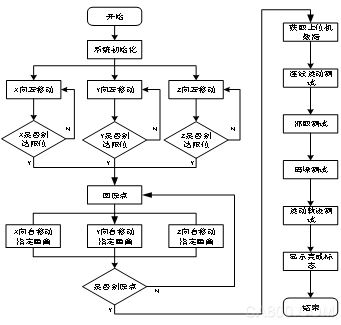
图3 控制系统运行流程图
4.1 逆解控制算法的程序设计
以X轴逆解算法为例,根据对逆解过程的分析,当已知X、Y、Z坐标后,既可求出X实际角度为IN1,与上次实际角度IN2的差值即为变化的角度,再乘以最小脉冲对应的角度IN3和最小脉冲对应的位移IN4,便可求出实际移动位移IN5。
 (2)
(2)
4.2 轨迹规划控制算法的程序设计
机械手轨迹控制算多种多样,本设计采用的是最优路径控制,即实现机械手末端从起始位置到目标位置沿直线运动。以二维平面为例,设起始坐标(0,0),终点坐标(1,1),将两点间的直线分解为X轴和Y轴冲量,通过比对,若要沿直线运动,就必须保证两轴以固定速度同时到达目标点。因此,对于三维平面最优路径也满足此条件,采用直线插补方式和化曲为直的方法,将n多个单位路径组合在一起,形成最终的轨迹路径[2]。
5 系统调试
通过上位机WinCC发送指令,按照连续运动、抓取、码垛、轨迹规划的顺序进行测试。具体测试数据与调试情况参见表1和图4所示。在测试过程中,该系统能够快速响应操作员的指令,同时按照预定轨迹移动到指定坐标,对货物进行抓取,并按照指定规则进行码垛摆放。但随着抓取重量的增加,精度有所下降,最佳抓取范围在0-400g[3]。
表1 实际测试数据
|
|
给定位置 |
实际坐标 |
货物重量 |
控制精度 |
|
1 |
(0,250,119) |
(0,249.6,119.7) |
300g |
0.16% |
|
2 |
(100,200,120) |
(100.1,250.1,119.6) |
200g |
0.10% |
|
3 |
(110,180,100) |
(110.7,181,119.5) |
600g |
0.45%
|

图4 抓取情况
5 结束语
本文设计了一套基于PLC的三轴机械手控制装置。此系统以S7-1200PLC为核心,通过对机械手逆运动学和运动路径的解析,并结合控制算法,进而对步进电机和真空气泵完成控制,实现了对机械手末端的精准定位和轨迹规划,以及对货物的抓取与摆放。在实际操控过程中,可以使用可视化编辑器、触摸屏及以太网通讯技术分别对整个系统进行仿真和远程实时监控,很好的完成了人机交互,达到设计的目的。
参考文献
[1] 董必文.三轴机械臂运动轨迹控制系统[J].制造业自动化,2015,17(6):31-33.
[2] 侯宛辰.基于PLC的机械臂控制[D].天津理工大学,2014.
[3] 李景魁.基于PLC的机械手控制系统设计[J].煤矿机械,2012,33(10):147-148.

电话:15906845558 QQ:41780253
网址:www.gkplc001.com
江东教学点:宁波江东百丈东路1130号海运港8楼(地铁一号线旁边)
海曙校区:海曙区学院路788号upark商业公园B4幢一楼
石浦大酒店旁边匠心教育
Copyright @ 2010-2020 宁波蓝天教育. All Right Reserve
备案号:浙ICP备16003439号-2





 在线咨询
在线咨询
 15906845558
15906845558